
BOSTON, MA
TUESDAY, 2.23.16■
Kevin has spent decades developing mobile robots. In his career he’s focused on dynamic balance, mobile manipulation, and maturing prototypes into products.
About
■
Kevin led development teams for the BigDog, LS3, Atlas, Handle, and Stretch Robots at Boston Dynamics. This included authoring the software that first enabled legged robots to walk through challenging, unstructured terrain. Kevin has acted as Chief Engineer on over a dozen mobile robot designs, leading both the hardware and software teams. He has degrees in Mechanical and Electrical Engineering, and is a hands-on expert in Control Systems and Real-time Software Development.
Kevin Blankespoor also acted as the Senior Vice President and General Manager of Boston Dynamics’ Warehouse Robotics Group. In Kevin’s role as General Manager, he was responsible for delivering the Stretch Product by coordinating engineering, sales, manufacturing, safety, integration, and service.


[ WITH BOSTON DYNAMICS ]Robots
Stretch
Stretch is designed to automate box moving tasks in warehouses and distribution centers. Stretch’s mobile base allows it to go to where repetitive box lifting is required - unloading trucks, building pallets of boxes and order building. Kevin led the Stretch team from prototype to product, releasing it as Boston Dynamics’ second product.
General Manager 2019-2023
Handle
Co-Inventor and Chief Engineer
2016-2019
Handle is a descendant of Atlas, aimed at warehouse robotics. It combines the speed and efficiency of wheels with the agility of legs and a counter-balancing tail. Kevin co-created the Handle concept and acted as Chief Engineer on two versions of the robot.
Atlas
Lead Robotics Engineer for Atlas Robot
2014-2016
Kevin led the software half of the Atlas team for 3 years. In that time, Atlas progressed from a lab robot to an all-terrain field robot. Atlas also began to perform mobile manipulation tasks aimed at case handling and warehouse tasks.
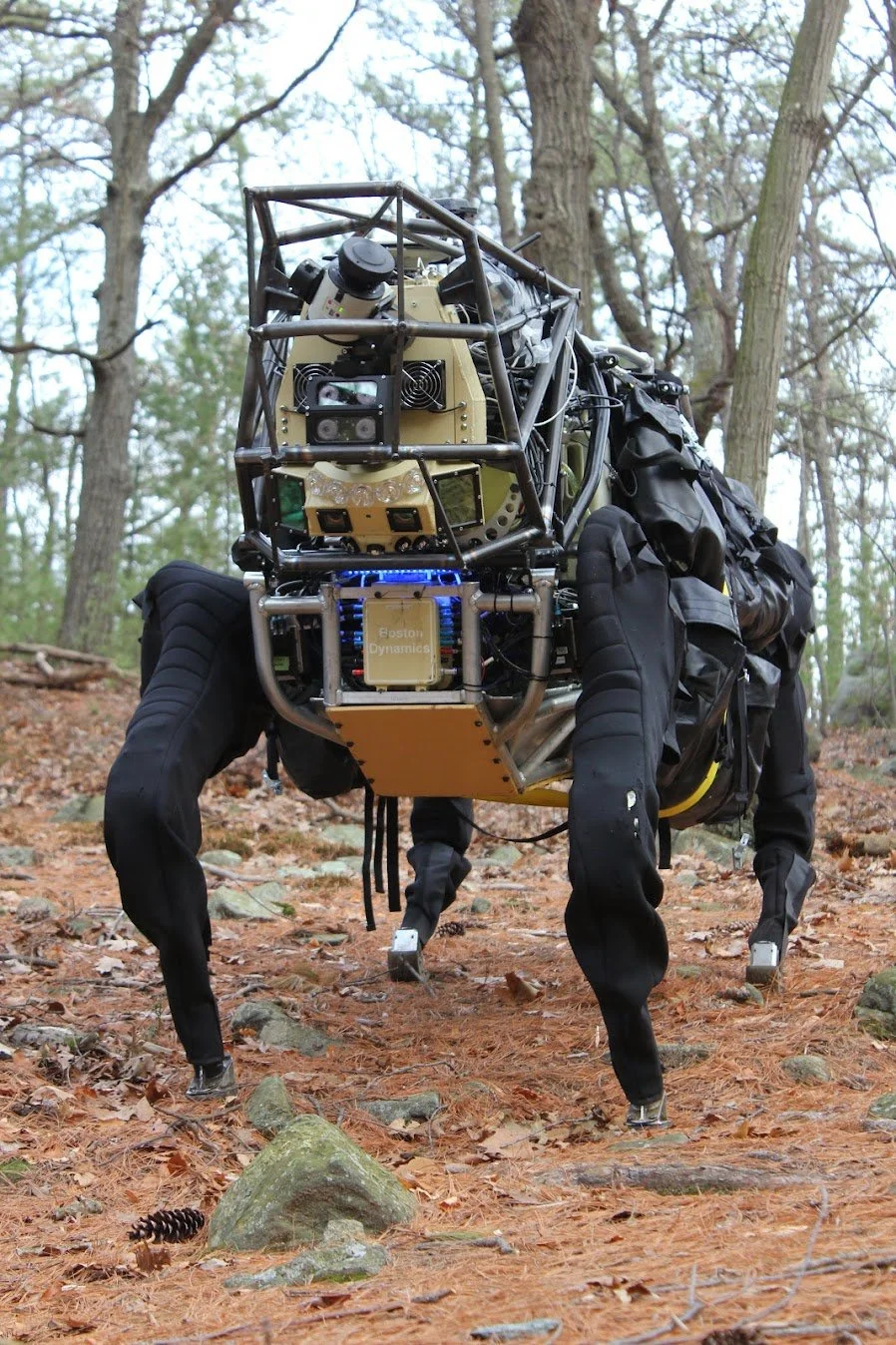
LS3
Chief Engineer for LS3 Robot
2010-2014
The Legged Squad Support System (LS3) was a rough-terrain robot developed by Boston Dynamics with funding from DARPA and the US Marine Corps. Kevin acted as Chief Engineer on LS3 for the entirety of the project, which was the largest DARPA funded project at Boston Dynamics. Beyond Boston Dynamics, the LS3 team included subcontractors from Carnegie Mellon, NASA’s Jet Propulsion Laboratory, Bell Helicopter, and Textron.
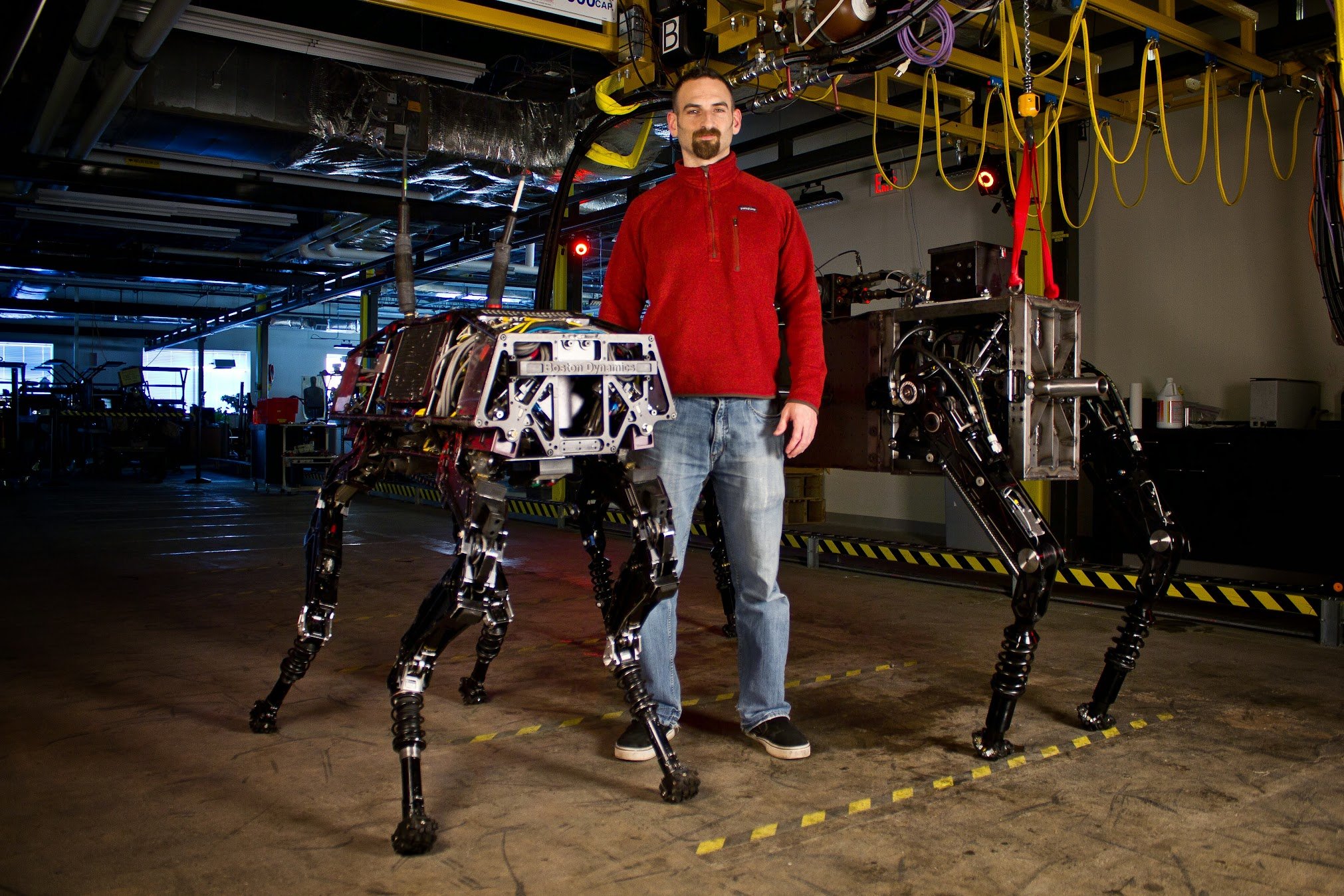
BigDog
Controls Developer & Chief Engineer for BigDog Robot
2004-2010
BigDog was the first legged robot to leave the laboratory and successfully traverse challenging terrain like mud, snow, and rocky hiking trails. Kevin authored the controls software the enabled BigDog to dynamically balance through slips, kicks, and other perturbations. Kevin went on to be the Chief Engineer for BIgDog, leading both the hardware and software engineering teams.
TV Appearances
60 Minutes with Anderson Cooper


BBC: Rise of the Robots
■
Patents and Publications
“BigDog, the Rough-Terrain Quadruped Robot,” Raibert, M., Blankespoor, K., Nelson, G., Playter, R., The International Federation of Automatic Control, 2005
“Autonomous Navigation for BigDog,” Wooden, D., Malchano, M., Blankespoor, K., Howard, A., Rizzi, A., Raibert, M., Robotics and Automation (ICRA), 2010
Inventor on 20 Patents
Before Boston Dynamics
■
Maxtor Corporation Shrewsbury, MA
Senior Electrical Engineer 2001–2004
Servo Engineer responsible for hard disk drive control systems.
Blueprint Automation Richmond VA
Project Engineer / Project Manager 1996 – 1999
Mechanical Engineer responsible for developing factory automation systems.
Education:
University of Colorado, Boulder, CO 1999 – 2001
Degree: Masters of Engineering in Electrical Engineering
GPA: 4.0
Concentration: Automatic Control Systems and Embedded Systems Design.
University of Virginia, Charlottesville, VA 1991 – 1995
Degree: Bachelors of Science in Mechanical Engineering
GPA: 3.7

[ CONTACT ]